
ミリ波レーダ技術と設計ー車載用レーダやセンサ技術への応用ー (設計技術シリーズ69)
はじめに
下記の記事で述べたように、
ロボット用センサの一つとしてレーダセンサが上げられます。
ロボットのための外界認識センサの基礎 - MY ENIGMA
レーダ(RADAR:Radio Detection And Rangin)
センサは、電波を照射し、
対象物体に反射した電波を受信することにより、
対象物体の位置(距離と角度)や相対速度を観測するセンサです。
取得できる情報に関しては、レーザセンサにかなり近いですが、
後述するようにレーザセンサには無い特徴も有しています。
この種のレーダセンサは、
主に自動車や農業・建設機械のロボット化における
センサとして広く使用されており、
それに特化したレーダセンサを車載レーダとも呼びます。
今回はこのロボット用のレーダセンサの基本的な原理と、
その特徴について説明したいと思います。
車載レーダの周波数帯
車載レーダが主に使用している周波数帯は
30GHz~300GHz(波長10mm~1mm)の
一般的にミリ波帯と言われている周波数帯です。
総務省 電波利用ホームページ | 周波数帯ごとの主な用途と電波の特徴
この帯域の電波は指向性が強いため、
その電波の反射を解析することにより、
対象物の距離と速度を検出することができるのです。
レーダによる受信電波の特徴
下記の式は、目標物体からの反射信号の
受信電力Prの計算式です。

ここで、Ptは送信電力
Grは受信アンテナ利得、
Gtは送信アンテナ利得、
λは電場波長、
Rは目標物体までの距離、
σはレーダ反射断面積、
Lrは降雨減衰、Laは大気減衰です。
この式を見ると分かる通り、
受信電力は波長の二乗に比例し、
対象物までの距離の4乗に反比例することがわかります。
従って受信電力だけを見れば、
波長が長いほうが遠距離の観測が可能になります。
FM-CW方式による距離・速度計測
一般的な車載レーダセンサは、
Frequency-Modulated Continuous-Wave (FM-CW)方式
という方式を使用していることが多いです。
Continuous-wave radar - Wikipedia, the free encyclopedia
FM-CWレーダは、下記の図*1のような周波数が
三角波の形をした電波を送信し、
送信波と受信波の波形の違いから
対象物体の距離と相対速度を検出することができます。

FM-CW形式では、送信電波と対象物から反射した送信波が混ざった
ビート信号という電波を受信し、そのビート信号の周波数を解析します。
三角波の中での周波数の増加時のビート信号の周波数をf_UB、
減少時のビート信号の周波数をf_DBとすると、
これらの周波数の値から対象物までの距離Rは、
下記の式で計算されます。

ここでc(299792458 m/s)は光速で既知の情報であり、
f_mは三角波の変調周波数、
Δfは三角波の変調幅で、
それぞれのレーダの既知パラメータとなるので、
計算可能になります。
同様に、対象物の相対速度は下記の式で計算されます。

ここで、f_oは中心周波数ですので、
これもレーダの既知パラメータです。
電子スキャン方式による物体の角度検出
前章の計算方法で、アンテナ方向に対する
対象物体の距離と相対速度が計算できますが、
このままでは一次元のセンサになってしまいます。
そこで一般的に2つの方法で
このレーダセンサをスキャンさせて
二次元のセンサにすることができます。
一つ目の方法は、
機械式スキャンという方法で、
レーダのアンテナを機械的に回して、
その時のアンテナの角度と先ほどの計算方法で、
対象物体の相対的位置[x,y]と相対速度[v]を計算できます。
しかし、この機械式スキャンは駆動部があるため、
センサのサイズが大きくなり、
また、振動などにも弱くなってしまいます。
そこで、現時点で車載レーダの一般的な方式として、
利用されているのが、電子スキャン方式です。
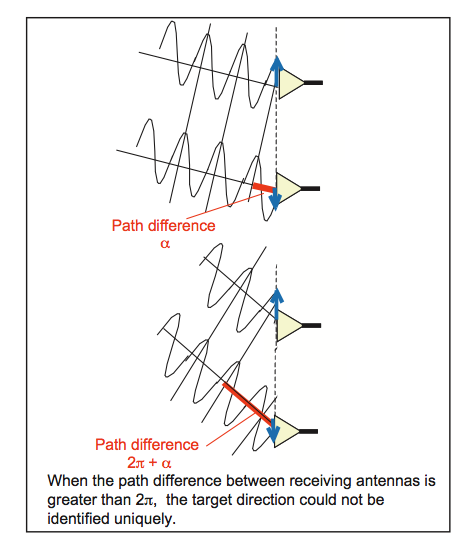
この電子スキャン方式は、
複数のアンテナを同じ方向に配置することで、
下記の図のように、
それぞれのアンテナの受信周波数の位相差を計算することで、
対象物体の角度を計算することができます。
この電子スキャン方式は駆動部が無いため、
サイズが小さく、振動に強くなります。
レーダセンサの特徴
他のセンサと比べて、
レーダセンサは下記の利点と欠点があると言われています。
利点
- 検知距離が長い(ミリ波レーダの場合、最大観測距離100m以上が一般的)
- 雨や埃、霧などの外界ノイズの影響を受けにくい
- 対象物体の位置だけでなく、相対速度も同時に観測可能
- 電子スキャン方式の場合、駆動部が無いため振動などに強い
- 高性能なレーザセンサに比べると比較的安価