
目次
はじめに
ROSのbagファイルのデータは
シミュレーションなどには非常に使いやすいですが、
オフラインでグラフを書いたりする場合には、
少し使いづらいと思っていました。
そこで、
ROSのbagファイルを選択し、
その中の任意のトピックデータを
CSVに保存するGUIツールrosbag_to_csvを
作ったので紹介します。
ソフトウェアリポジトリ
rosbag_to_csvは下記のGitHubリポジトリで管理されています。
インストール
下記のコマンドでソフトをcloneして下さい。
$ git clone https://github.com/AtsushiSakai/rosbag_to_csv.git
使い方
ノードを起動する
下記のコマンドでノードを起動します。
$ rosrun rosbag_to_csv rosbag_to_csv.py
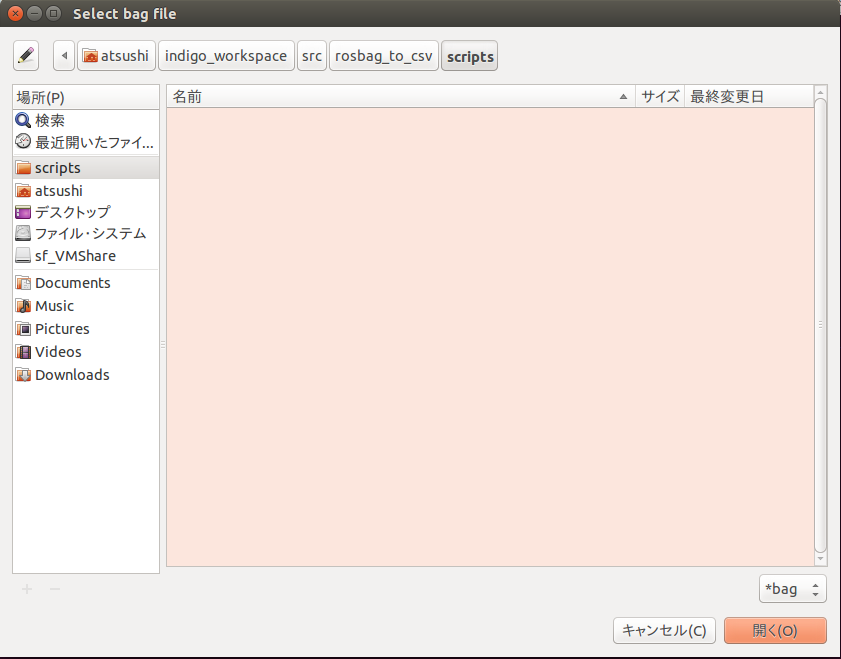
ファイル選択ウインドウでbagファイルを選択する
ノードを起動すると、
下記のようなファイル選択ウインドウが表示されるので
変換したいbagファイルを選択します。
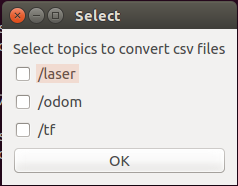
CSVに変換したいトピック名を選択する
選択されたbagファイル内のトピックのリストが
下記のように表示されるので、
CSVに変換したいトピックを選択します。
変換されるので、少し待ちます
ターミナル上にConvertingという文字が表示されるので、
変換が終わるのを少し待ちます。
変換終了
下記のようなメッセージが表示された場合、
CSVファイルが、正しく生成されたことをを意味します。
scriptsフォルダの中に、
下記のようにCSVファイルが生成されているはずです。
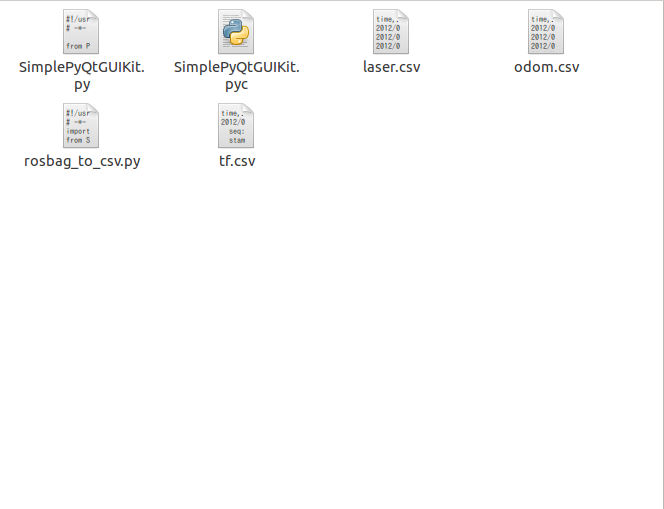
CSVファイルの名前は、選択されたトピック名と同じになります。
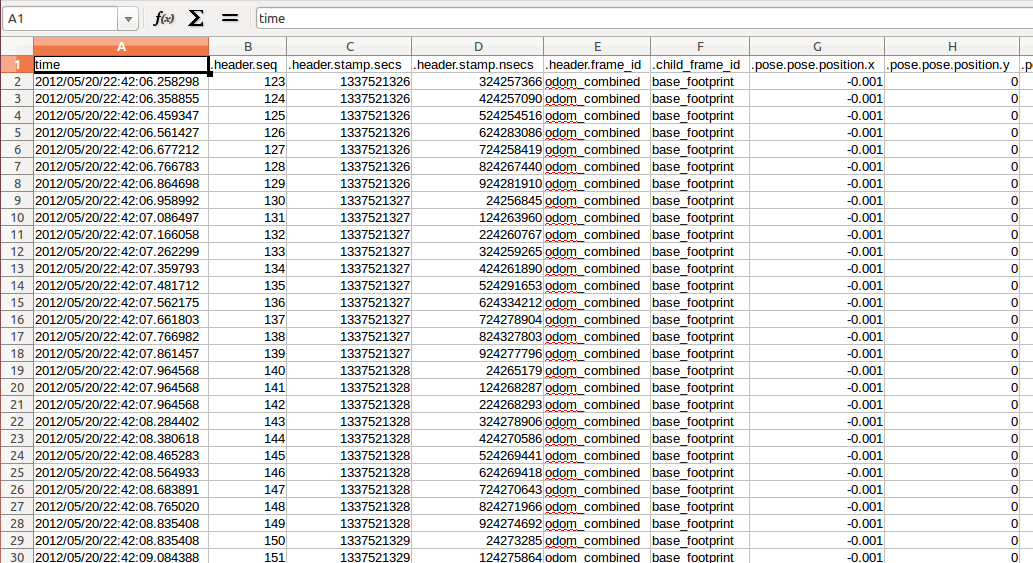
また、生成されたCSVファイルを開くと、
下記のように各トピックのデータが時刻毎に保存されていることが確認できます。
参考資料
MyEnigma Supporters
もしこの記事が参考になり、
ブログをサポートしたいと思われた方は、
こちらからよろしくお願いします。