
目次
はじめに
ROSを使っていると、
とりあえず
$ rosbag record -a
でトピックをbagファイルに保存し、
後で必要なトピックのみを抽出した
bagファイルを作りたくなります。
そんな時に便利なのが
rosbag filterですが、
保存されているトピック名を調べて、
一つ一つコマンドラインに記入するのが
面倒だなと思っていました。
そこで、
最近勉強しているPyQtを使って、
簡単にトピックをフィルタリングできる
GUIツール rosbag_filter_gui
を作成し公開したので、
紹介したいと思います。
rosbag_filter_guiのソースコード
下記のGitHubレポジトリで公開しています。
使い方
1. ソフトウェアをGitHubからcloneする
$ git clone https://github.com/AtsushiSakai/rosbag_filter_gui.git
2 スクリプトを起動する
下記のように
scriptsフォルダ内のpythonスクリプトを起動してもいいですし、
$ python rosbag_filter_gui.py
rosrunでノードを起動してもOKです。
$ rosrun rosbag_filter_gui rosbag_filter_gui
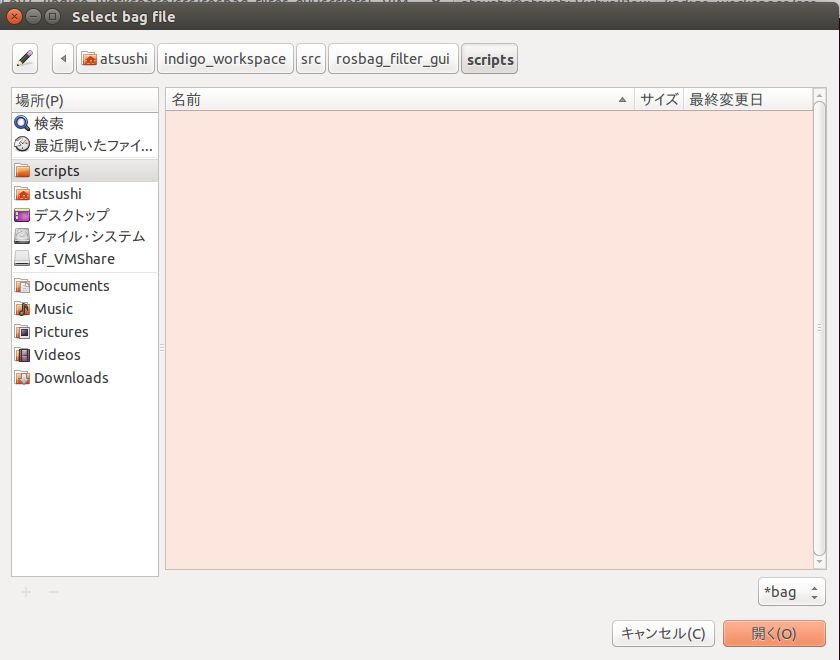
3 フィルタリングをしたいbagファイルを選択する
下記のようなファイル選択画面が出てくるので、
フィルタリングをしたいbagファイルを選択します。
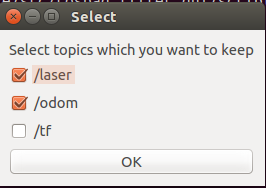
4 残したいトピックを選択する
下記のように、
選択したバグファイル内のトピックがリストで表示されるので、
bagファイルに残したいトピックを選択します。(複数可)
5 しばらく待ちます。
下記のようにConverting..と表示されたら、
bagファイルの変換をしている最中なので、
しばし待ちます

6 変換終了メニューが表示されます
下記のような、変換終了メニューが表示されたら、
変換は終了です。
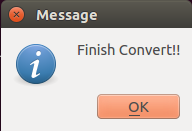
フィルタリングされたbagファイルは、
元のbagファイルと同じディレクトリに生成されます。
参考資料
MyEnigma Supporters
もしこの記事が参考になり、
ブログをサポートしたいと思われた方は、
こちらからよろしくお願いします。